Régulation adaptative
Principe
Si la plupart des dispositifs industriels fonctionnant en régulation de maintien peuvent être considérés comme linéaires autour du point de fonctionnement adopté, cette simplification ne peut plus être envisagée lorsque :
- l’amplitude de la perturbation principale Z est grande
- la consigne de fonctionnement W varie
Le gain statique K du procédé, ainsi que les autres paramètres caractéristiques du système pouvant dépendre du point de fonctionnement adopté, les réglages du régulateur associés à un point de fonctionnement ne seront plus valables pour un autre.
Il est alors nécessaire d’adapter les réglages du régulateur aux conditions de fonctionnement.
Mise en place de la régulation adaptative
Après étude pratique
L’étude du système est réalisée par l’identification du procédé en plusieurs points de fonctionnement permettant, notamment, de tracer un réseau de caractéristiques statiques du système. Les réglages du régulateur (A, Ti et Td) varient en fonction des conditions de fonctionnement.
Paramètre adaptatif
Les réglages du régulateur peuvent être modifiés en fonction, par exemple, de la valeur :
- de la consigne ou de la mesure : utilisé en régulation d’asservissement sur un procédé fortement non linéaire et faiblement perturbé
- du signal de commande : en régulation d’asservissement, Z variant peu, ou de maintien (la perturbation n’étant pas mesurée)
- de la grandeur perturbatrice du système : utilisé en régulation de maintien, dans le cas où le procédé est linéaire mais fortement perturbé (exemple : régulation de rapport adaptative)
- de l’écart mesure-consigne : par sécurité, en cas d’augmentation de cet écart, les réglages ser ont durcis.
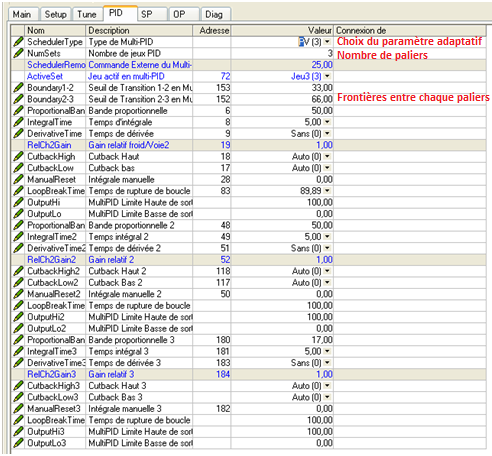
Mise en oeuvre
Les réglages du régulateur prendront des valeurs données dans des plages de fonctionnement données.
Selon le matériel à disposition,
On parlera d’adaptation par paliers.
On parlera d’adaptation par segment.
Les réglages du régulateur varieront continûment en fonction des variations du paramètre adaptatif selon une courbe linéarisée par segments prédéfinie.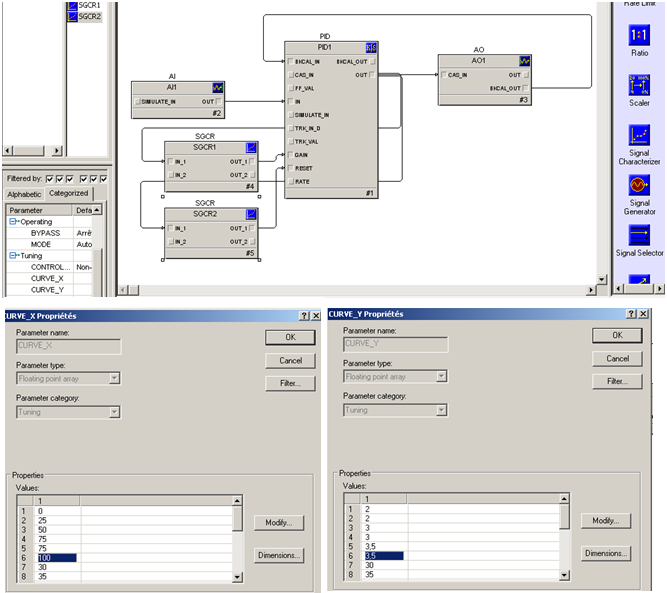
Après étude théorique
Les réglages du régulateur seront calculés à tout instant selon une expression mathématique définie à l’avance.
Exemple: mélange en ligne
Exemple: régulation de rapport adaptative
Présentation du procédé
On asservit un débit d’eau chaude réglé par la vitesse de rotation d'une pompe centrifuge, à un débit d’eau froide réglé par l'ouverture d'une vanne.
On met en place une régulation de rapport.
Le débit d’eau chaude est limité à \(Q_{chaudmax}=5 m^{3}.h^{-1}\) par une vanne manuelle. L'étendue d'échelle du capteur de débit d'eau froide et d'eau chaude est de \([0-10m^{3}.h^{-1}]\)
Le signal de mesure reçu par le régulateur de rapport est \(M=\dfrac{M_{chaud}}{M_{froid}}\)
or \(M_{chaud}=K_{p}K_{t}\times Yr\) avec \(K_{p}=0.05 m^{3}.h^{-1}.\%^{-1}\) et \(K_{t}=10\%.m^{-3}h^{1}\) L'équation reliant le signal de mesure reçu par le régulateur à Yr et à \(M_{froid}\) est donc \(M=\dfrac{K_{p}K_{t}\times Yr}{M_{froid}}\)Le gain statique du système est \(\boxed{K=\dfrac{\Delta M}{\Delta Yr}=\dfrac{K_{p}K_{t}}{M_{froid}}}\)
On constate qu'à débit d'eau froide constant, le gain statique du système ne dépend que du coefficient \(K_{p}K_{t}\) , donc de l'ouverture de la vanne de réglage du débit maximum d'eau chaude. En augmentant le débit maximal possible d'eau chaude, le gain du système augmente. Une fois l'ouverture de cette vanne réglée, elle n'est pas censée être modifiée. On peut donc considérer le système comme linéaire.
Par contre, le gain du système est inversement proportionnel à la mesure du débit d'eau froide.
Compte tenu des résultats précédents, les réglages du régulateur n'auront pas à être modifiés pour des consignes de rapport différentes à débit d'eau froide constant.
Par contre les réglages du régulateur devront s'ajuster à la valeur de la mesure du débit d'eau froide afin d'avoir un comportement en boucle fermée constant.
Pour cela, il faut que le gain de boucle \(AK=cste =2\) par exemple. Alors : \[\boxed{A=\dfrac{2}{K}=\dfrac{2M_{froid}}{K_{p}K_{t}}}\]ATTENTION : Régulateurs adaptatifs, auto-adaptatifs, auto-réglants
On distinguera :
- les régulateurs adaptatifs : ce sont des régulateurs où les paramètres classiques de réglage peuvent être élaborés par un bloc de calcul, en fonction de diverses informations sur le système.
- les régulateurs auto-adaptatifs : ce sont des régulateurs où un système expert détermine automatiquement un ajustement du réglage en fonction d’informations en provenance du dispositif physique.
- les régulateurs auto-réglants : ce sont des régulateurs disposant d’une procédure permettant d’obtenir un réglage lors de la phase de mise en service du régulateur.